- Dettagli
- Scritto da Gianni Bertozzi



Bertolini Andrea Hayer_Gurpreet_Singh Rondanini Davide
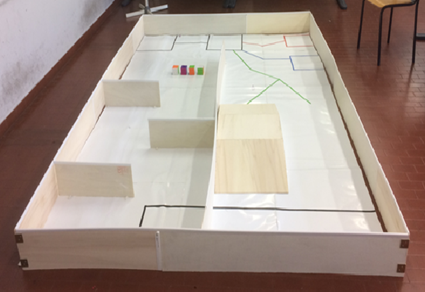
Il progetto è stato realizzato per consentire all’Istituto IIS L. Nobili di partecipare alla gara di robotica organizzata da National Instruments che si terrà il 14 Novembre 2017. Si tratta di una competizione tra varie scuole che consiste nel realizzare un robot, controllato dalla scheda programmabile NI myRIO, capace di muoversi in un determinato percorso. Il tracciato si divide in tre momenti che corrispondono ognuno ad una missione diversa.
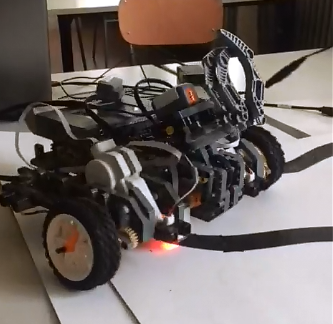
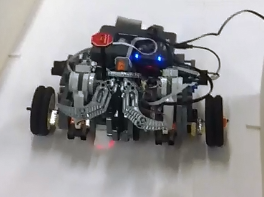
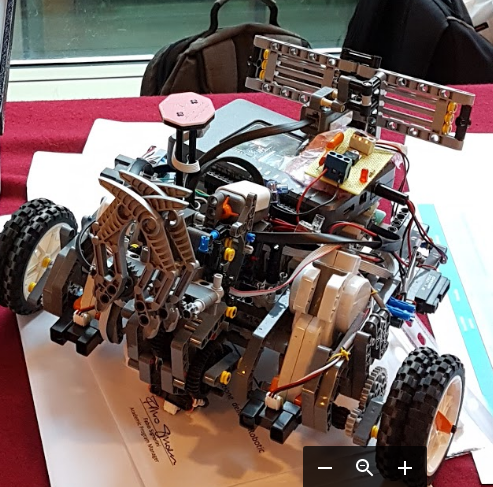
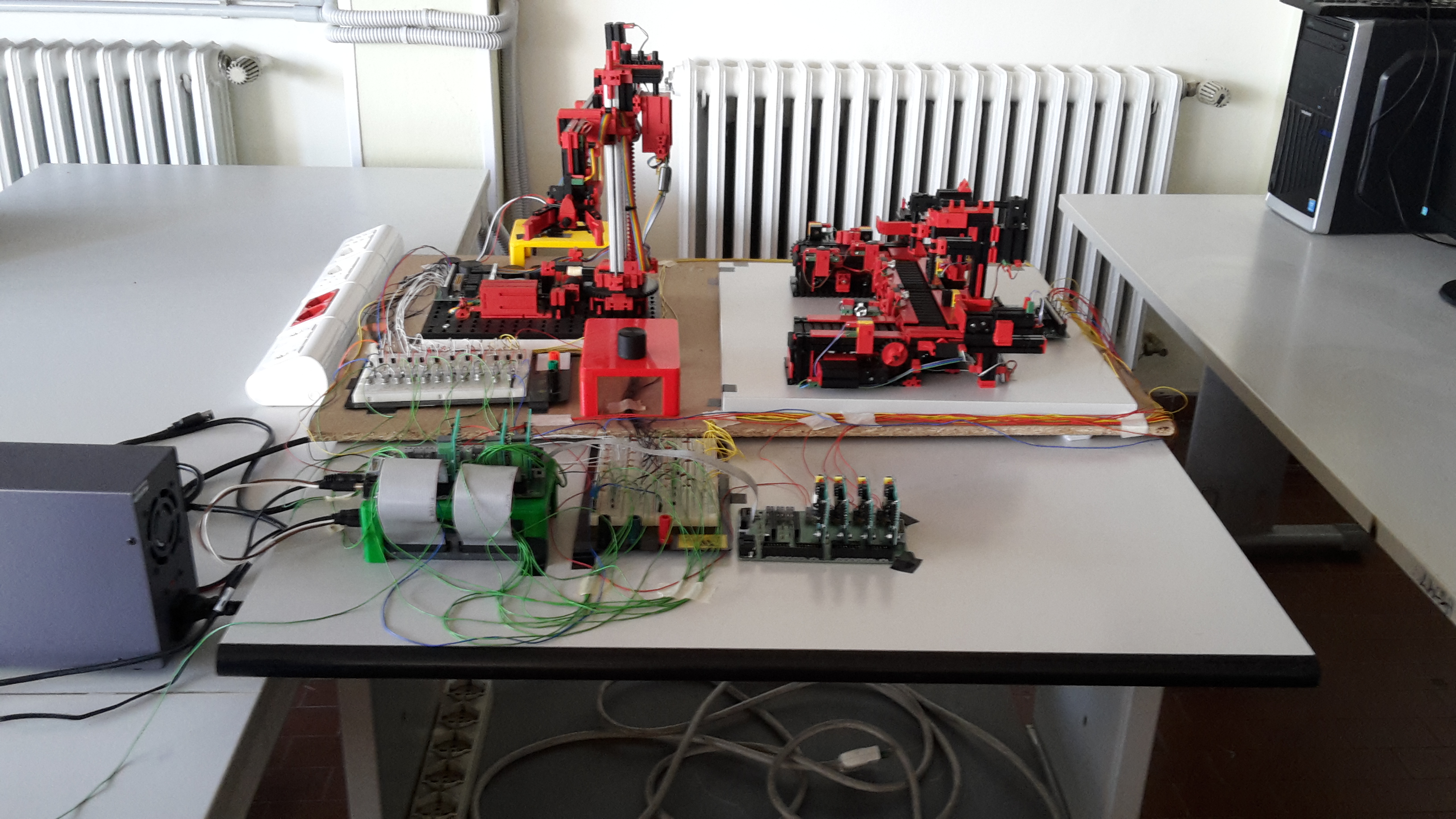
Nella prima parte del progetto abbiamo costruito il campo di gara e la struttura meccanica necessaria alla corretta movimentazione del robot ed a contenere la scheda NI myRIO, l’interfaccia di potenza e le batterie; la meccanica è realizzata esclusivamente tramite componenti Lego.
Il robot utilizza tre motori dotati di encoder, cinque sensori ad infrarossi per determinare la distanza di un ostacolo, un sensore di luce Lego per riconoscere un tracciato di colore nero ed un sensore compass per individuare la direzione rispetto al polo nord magnetico.
La demo realizzata è relativa alla prima missione.
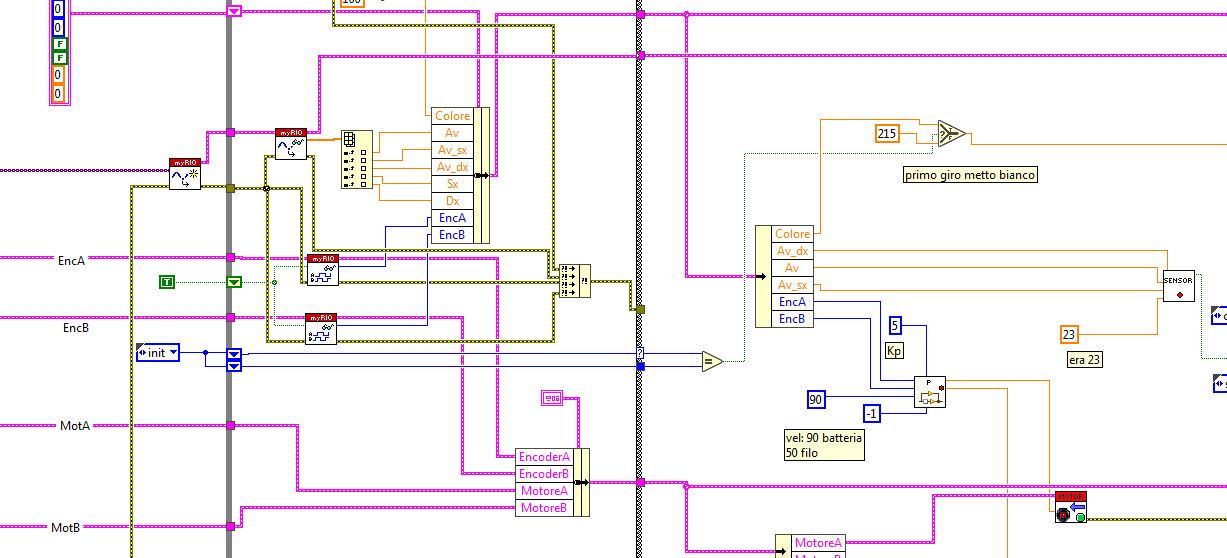
Il codice di gestione del robot è stato sviluppato tramite linguaggio di programmazione LabVIEW; l’applicazione è in esecuzione sulla scheda NI myRIO

Video:
Studenti coinvolti, classe 5E, indirizzo Elettronica ed Elettrotecnica, articolazione Automazione: Bertolini Andrea, Hayer Gurpreet Singh, Rondanini Davide
- Dettagli
- Scritto da Gianni Bertozzi
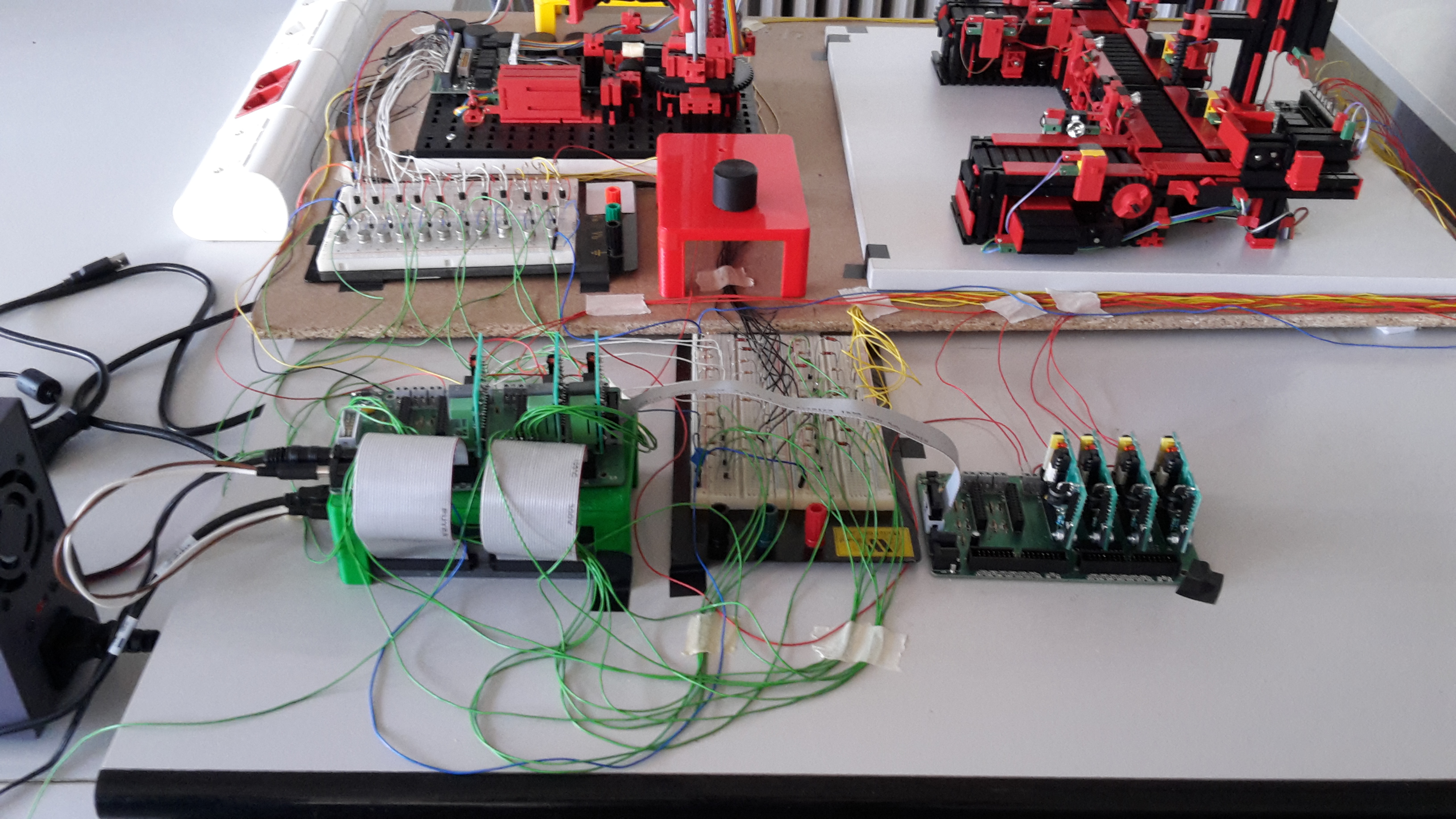
Il progetto d’esame consiste nel realizzare un sistema di controllo di un processo di lavorazione costituito da un robot manipolatore a 3 assi con pinza e da 4 nastri trasportatori con 2 stazioni di lavorazione, una per la fresatura e la seconda di foratura. L’impianto è realizzato tramite i prodotti Fishertechnik.
Il controllore utilizzato è costituito dalla scheda a microcontrollore programmabile NI myRIO prodotta da National Instruments e programmata tramite il linguaggio LabVIEW. Il software di gestione è sviluppato secondo il design pattern “state machine” che implementa un automa di Moore.
L’ Interfaccia d’ ingresso è realizzata tramite partitori di tensione, mentre in uscita la scheda NI myRIO pilota un driver a transistor e, per alcuni canali, la scheda commerciale My Conditioning.
Il sistema di controllo utilizza i seguenti canali:
18 canali di ingresso digitali, di cui 4 veloci (Encoder)
18 canali di uscita digitali
1 canale di ingresso analogico
Video:
Studenti coinvolti, classe 5E, indirizzo Elettronica ed Elettrotecnica, articolazione Automazione: Didier Beltrami, Alberto Fantini, Luca Zanella.




- Dettagli
- Scritto da Gianni Bertozzi
Leggi tutto: 3° posto della squadra dell’Istituto "L. Nobili" alla NI Robotic Competition 2017
- Dettagli
- Scritto da Gianni Bertozzi
