- Dettagli
- Scritto da Gianni Bertozzi
Progetto: La casa domotica


![]()
Progetto: Realism

![]()
- Dettagli
- Scritto da Gianni Bertozzi

Tamagnini Marco
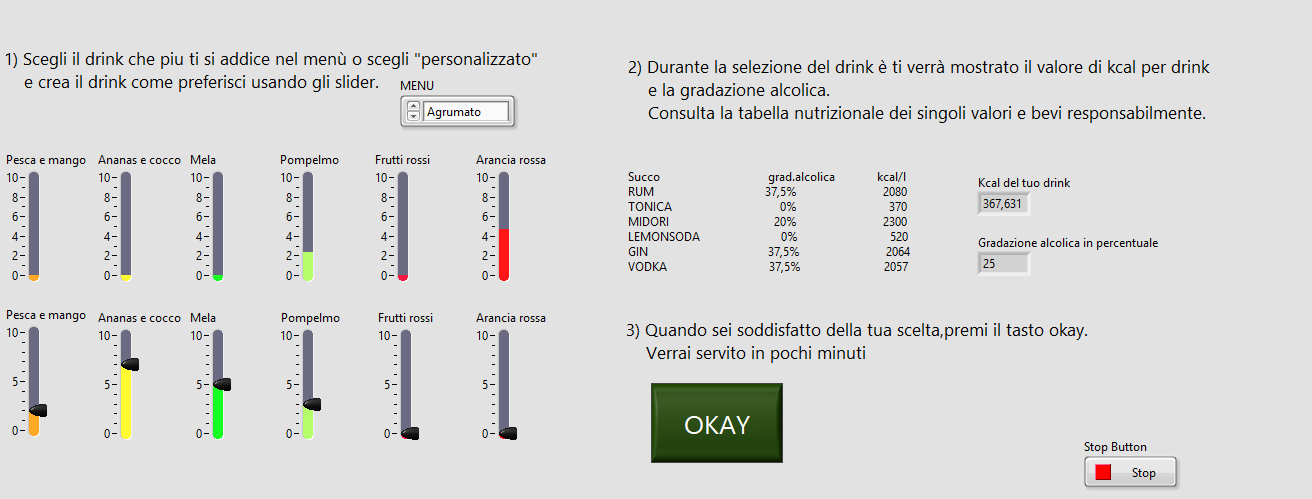
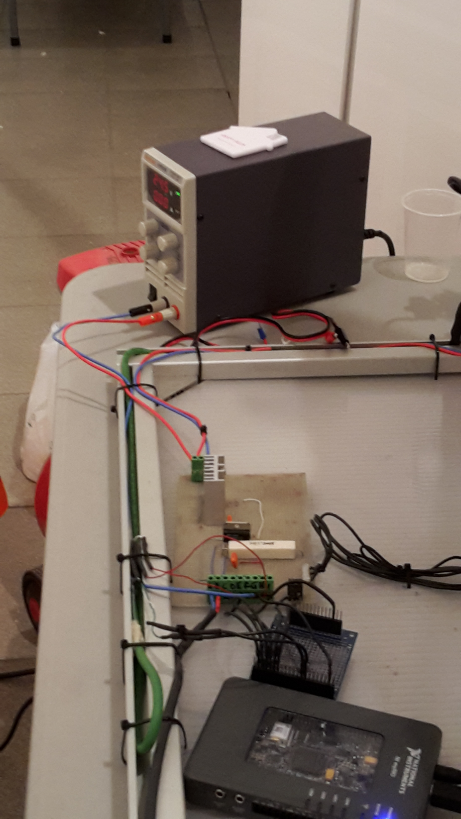
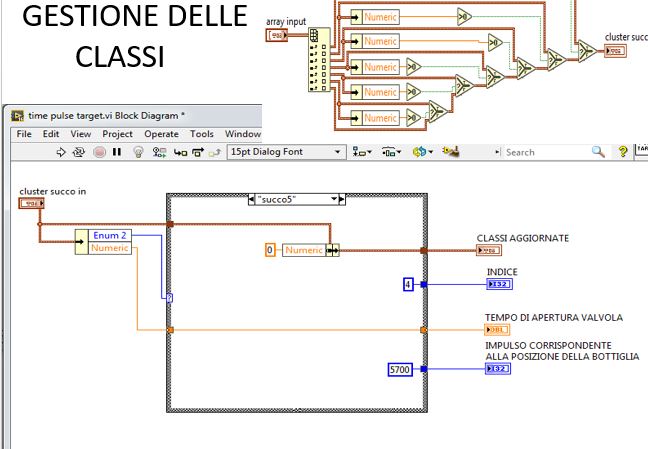
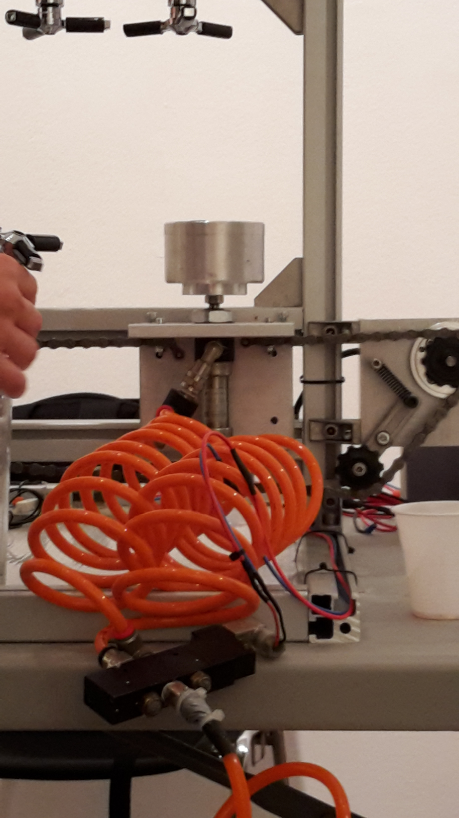
Progetto: SBORNIABOT

Il progetto realizza un erogatore di cocktail a base di succhi di frutta con selezione ingredienti tramite interfaccia grafica mostrata su laptop. La selezione consente la scelta del tipo di succo e della quantità; il sistema è completamente automatizzato: il bicchiere si sposta attraverso i punti di erogazione e a fine processo la bevanda è pronta per la consumazione. Il sistema gestisce i seguenti dispositivi hardware: motore DC 9V, elettrovalvola 24V, encoder incrementale; l’erogatore è basato su scheda programmabile NImyRIO ed è programmato in ambiente LaBVIEW; vengono utilizzati i seguenti canali della scheda:
4 canali digitali di uscita
2 canali digitali di ingresso
2 canali digitali di ingresso (encoder)
Studente:
Tamagnini Marco, classe 5E, indirizzo Elettronica ed Elettrotecnica, articolazione Automazione
Video:
- Dettagli
- Scritto da Gianni Bertozzi



Andreoli Corrado Mantovani Mattia Redeghieri Federico
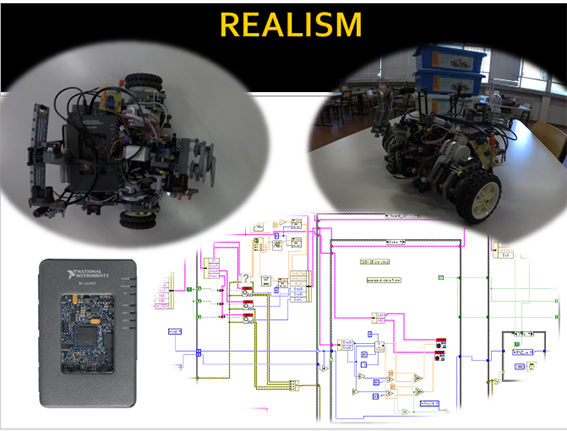
Progetto: REALISM

Il progetto costituisce la prosecuzione di un’analoga attività iniziata nell’anno scolastico 2016/17, con la finalità di costruire un robot tramite mattoncini tecnici Lego e di dotarlo di una intelligenza programmabile costituita dalla scheda NImyRIO in uso nel nostro Istituto. La scheda è programmata in ambiente LabVIEW, sfruttando librerie sviluppate da studenti dell’Istituto Tecnico Severi di Padova e collaborando con essi nell’implementazione di una specifica libreria. Si consideri infine che il robot è progettato per esibirsi alla competizione di robotica NI Robotic 2017, il cui regolamento prevede la partecipazione ad una sfida basata su tre missioni.
La prima missione consiste nell’evitare ostacoli e termina con la pressione di un pulsante; la seconda prevede il prelievo di una pallina e il deposito della stessa in una zona specifica. In ultimo la terza missione richiede il superamento di una rampa, collocata a lato del percorso.
Ad inizio anno scolastico il robot aveva una fisionomia definita ed un software in grado di affrontare la prima missione.
Il nostro lavoro inizialmente si è concentrato nella modifica meccanica della parte posteriore e nello studio e miglioramento della risposta dei sensori di distanza ad infrarossi. Successivamente abbiamo sviluppato e testato il codice della seconda missione. Pur non avendo un sistema in grado di affrontare con sicurezza le tre missioni, abbiamo partecipato alla gara di robotica NI Robotic Competition organizzata da National Instruments all’interno dell’evento NI days in data 14 Novembre 2017 e il nostro robot ha conquistato il terzo posto in classifica.
L’ultima parte del progetto ha avuto come obiettivo una modifica meccanica ed elettronica del sistema, al fine di eliminare l’uso del sensore Compass e sostituendolo con due sensori di distanza ad infrarossi, più robusti ad eventuali disturbi elettromagnetici potenzialmente in grado di alterare i valori del Compass. Naturalmente ciò ha significato lo sviluppo di un codice alternativo per affrontare la seconda missione, cambiando l’algoritmo di “posizionamento”. In ultimo abbiamo progettato e sviluppato il codice relativo alla terza missione.
Studenti coinvolti, classe 5E, indirizzo Elettronica ed Elettrotecnica, articolazione Automazione: Andreoli Corrado, Mantovani Mattia, Redeghieri Federico

Video:
- Dettagli
- Scritto da Gianni Bertozzi
a.s. 2018/2019
Elenco dei corsi e modulo di adesione alle proposte di formazione digitale d'Istituto per docenti di ruolo e a tempo determinato LINK
---------------------------------------------------------------------
Orario dei corsi: dalle ore 14:30 alle ore 16:30
Aula corsi: C0.09
Eventuali variazioni verranno comunicate
--------------------------------------------------------------------
Corso Arduino
Aula O5.51 orario di inizio 14:15 c.a.