
Bernardi Andrea
LA MANO ROBOTICA
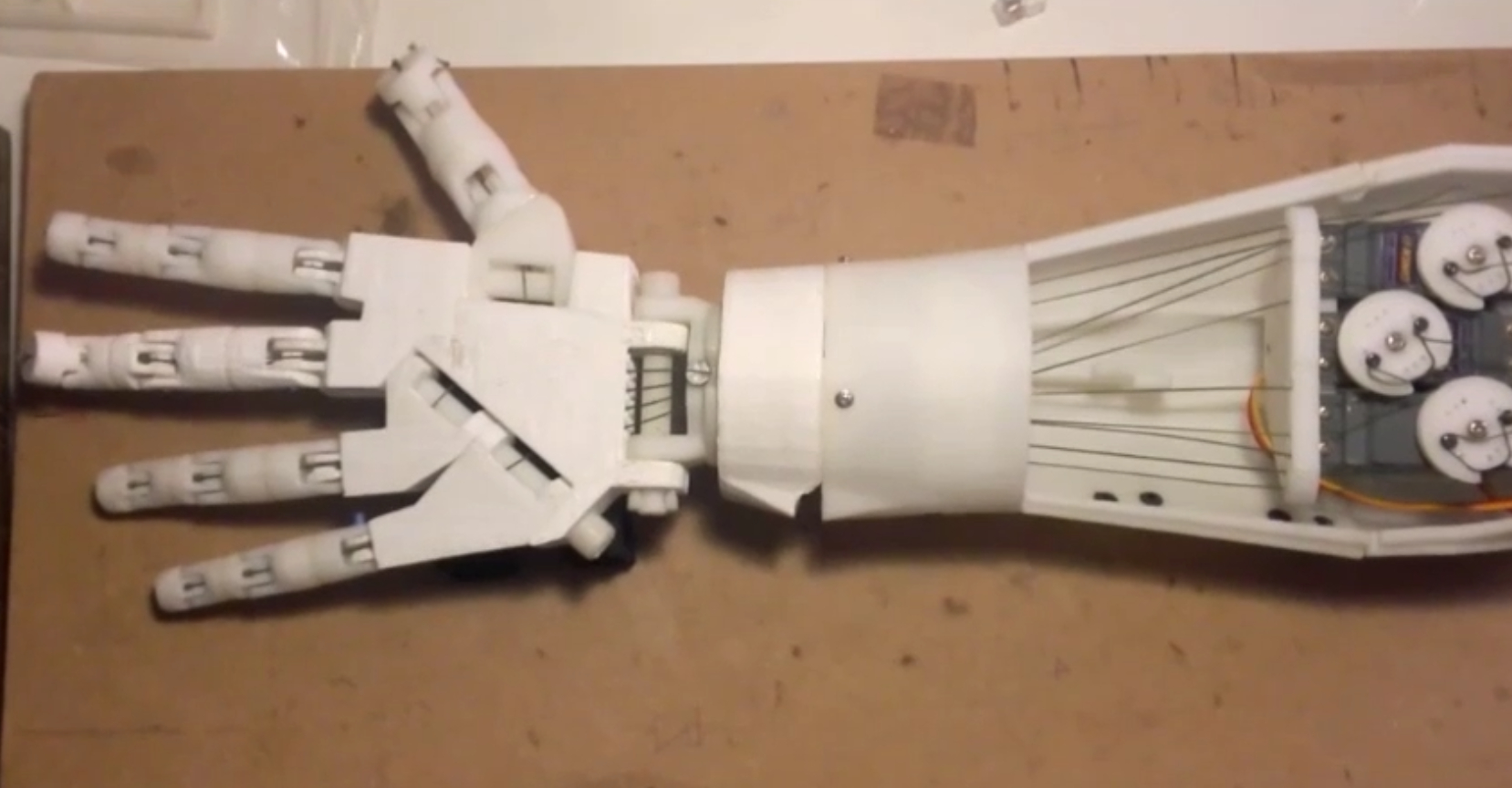
Il progetto prevede la costruzione di una mano robotica e la gestione della stessa tramite la scheda a microcontrollore Arduino; quest’ultima funge da interfaccia fra mano robotica e PC sul quale gira il codice di gestione scritto in LabVIEW.
La mano robotica è stata disegnata interamente con AutoCAD e creata con la stampante 3D, il materiale utilizzato è l'ABS.
La gestione della mano robotica avviene in due modalità, denominate automatica e manuale e quindi sono previsti due codici LabVIEW differenti.
La modalità manuale necessita di un guanto con sensori resistivi di flessione che permettono di replicare la movimentazione delle dita dell’individuo che indossa il guanto medesimo: la mano robotica quindi deve replicare la movimentazione della mano reale.
La modalità automatica prevede l’esecuzione di una movimentazione predeterminata e impostata tramite il codice LabVIEW: nel nostro caso l’apertura e successiva richiusura delle dita.
Studente coinvolto, classe 5E, indirizzo Elettronica ed Elettrotecnica, articolazione Elettrotecnica: Bernardi Andrea
Video del progetto: